|
prev
next
|
JMWR型單軌吊智能無(wú)人駕駛系統(tǒng)創(chuàng)建時(shí)間: |
|
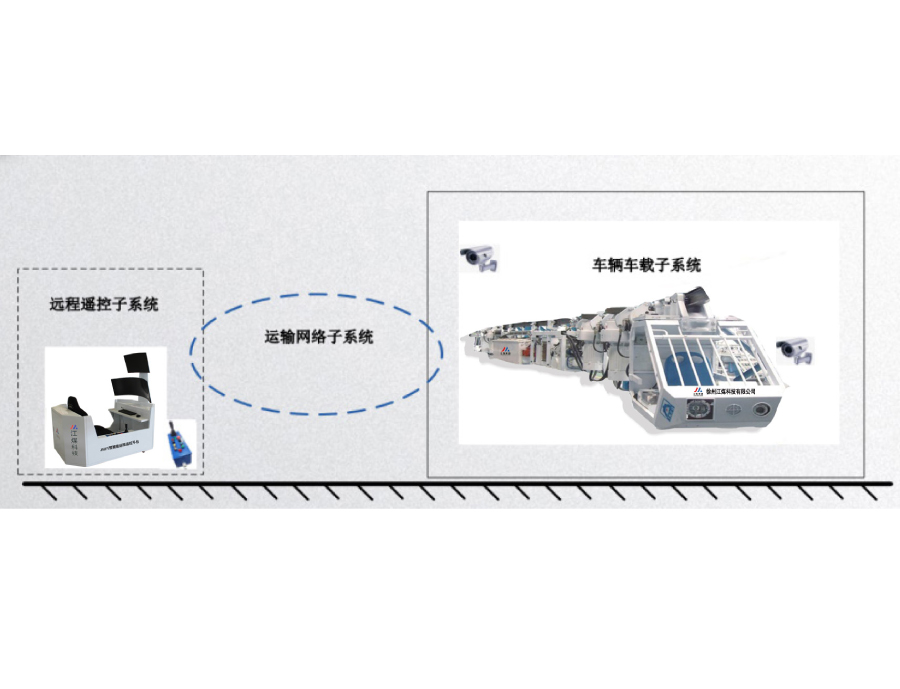
概述: 單軌吊作為礦山有軌運(yùn)輸系統(tǒng)的主要設(shè)備,,其高效穩(wěn)定運(yùn)行直接影響到煤礦運(yùn)輸任務(wù)的完成。由于井下工作環(huán)境較惡劣,,多潮濕和粉塵,,不穩(wěn)定和不安全因素較多,造成傳統(tǒng)人工駕駛單軌吊工作效率較低,,運(yùn)輸成本居高不下,,為此我公司設(shè)計(jì)一套完整的單軌吊智能無(wú)人駕駛系統(tǒng),以WIFI6(5G)無(wú)線通信技術(shù)為傳輸平臺(tái),,綜合軌道運(yùn)輸監(jiān)控技術(shù),、單軌吊精準(zhǔn)定位技術(shù)、視頻處理技術(shù)和單軌吊調(diào)度技術(shù),,對(duì)于減少或避免礦井重大生產(chǎn)運(yùn)輸安全事故,,降低運(yùn)輸成本,提升礦井物料生產(chǎn)轉(zhuǎn)運(yùn)效率,,具有重大的應(yīng)用前景和戰(zhàn)略價(jià)值,。 系統(tǒng)組成: 單軌吊智能無(wú)人駕駛系統(tǒng)主要由主控制系統(tǒng)、車載控制系統(tǒng),、定位系統(tǒng),、視頻監(jiān)控系統(tǒng)、通信系統(tǒng)組成,。 主控制系統(tǒng)主要由智能遠(yuǎn)程遙控平臺(tái)組成,,智能遠(yuǎn)程遙控平臺(tái)包括遠(yuǎn)程操作平臺(tái)、嵌入式核心控制器,、視頻處理顯示軟件,、狀態(tài)信息處理顯示軟件等,,是整個(gè)智能遠(yuǎn)程遙控系統(tǒng)的操作單元,,主要完成對(duì)設(shè)備無(wú)線遙控、視頻監(jiān)控,、設(shè)備工作狀態(tài)監(jiān)測(cè)記錄等功能,。智能遠(yuǎn)程遙控平臺(tái)布置在地表的監(jiān)控中心,界面采用視頻及設(shè)備狀態(tài)信息一體化顯示,,包括帶有操作手柄和開關(guān)的操作單元,、地面遠(yuǎn)程監(jiān)測(cè)計(jì)算機(jī)、電源模塊,、顯示器,、光纖交換機(jī)等。 系統(tǒng)功能: 1,、智能無(wú)人駕駛 智能遠(yuǎn)程駕駛是通過(guò)智能遠(yuǎn)程遙控平臺(tái)控制單軌吊的方式,,使操作者完全脫離現(xiàn)場(chǎng)危險(xiǎn)區(qū)域,,在遠(yuǎn)距離比較安全的區(qū)域?qū)崿F(xiàn)設(shè)備的所有控制功能。通過(guò)操作平臺(tái)上的顯示器可實(shí)時(shí)看到現(xiàn)場(chǎng)的畫面及設(shè)備狀態(tài)信息,,同時(shí)可做路徑規(guī)劃,,風(fēng)門及轉(zhuǎn)轍機(jī)等設(shè)備的聯(lián)鎖互動(dòng)控制。 系統(tǒng)保留原車的操作方式,,具備手動(dòng),、井上遠(yuǎn)程、井下遙控三種操作方式,。
井上遠(yuǎn)程駕駛
井下手動(dòng)駕駛 2,、精準(zhǔn)定位 精準(zhǔn)定位是通過(guò)定位裝置實(shí)時(shí)獲取機(jī)車位置信息和運(yùn)動(dòng)方向,使智能遠(yuǎn)程遙控駕駛系統(tǒng)做出正確的運(yùn)動(dòng)控制決策,。該技術(shù)基于接近開關(guān)融合UWB,,通過(guò)算法優(yōu)化做精度校準(zhǔn),精度可控制在30cm,。(現(xiàn)在井上定位采用RIFD定位卡定位) 3,、路徑規(guī)劃(實(shí)現(xiàn)自主無(wú)人駕駛) 基于精準(zhǔn)定位繪制電子地圖,系統(tǒng)開發(fā)路徑規(guī)劃功能,,主要通過(guò)在巷道中設(shè)置信號(hào)設(shè)備,,各設(shè)備之間相互通信,組成一個(gè)信號(hào)采集,、集中處理,、閉塞控制系統(tǒng),通過(guò)操作平臺(tái)上路徑規(guī)劃系統(tǒng)輸入單軌吊出發(fā)點(diǎn)和目的地位置,,合理的調(diào)度單軌吊運(yùn)行,,與關(guān)聯(lián)設(shè)備(井下風(fēng)門、岔道等)做聯(lián)鎖控制,,實(shí)現(xiàn)單軌吊的路徑規(guī)劃功能,。 4、安全探測(cè) 安全探測(cè)是通過(guò)安裝在單軌吊上傳感器做環(huán)境感知,,采用激光測(cè)距技術(shù)或AI攝像頭技術(shù),,對(duì)設(shè)備周圍路況信息進(jìn)行采集分析,實(shí)現(xiàn)對(duì)單軌吊行駛過(guò)程中前方遭遇障礙物時(shí)的處理,,執(zhí)行鳴笛,、減速、急停剎車等操作,。 5,、關(guān)聯(lián)設(shè)備聯(lián)鎖控制 在單軌吊的運(yùn)行路徑中會(huì)對(duì)轉(zhuǎn)轍機(jī)、風(fēng)門及攔車網(wǎng)進(jìn)行聯(lián)鎖控制,。需要對(duì)關(guān)聯(lián)設(shè)備做無(wú)線控制改造,、狀態(tài)監(jiān)測(cè),、本地及遠(yuǎn)程控制,以實(shí)現(xiàn)路徑規(guī)劃后單軌吊的自動(dòng)運(yùn)行,。在單軌吊要到達(dá)各點(diǎn)位之前,,會(huì)提前對(duì)下一個(gè)關(guān)聯(lián)設(shè)備做狀態(tài)監(jiān)測(cè),需判斷是否具備運(yùn)行條件,,只有監(jiān)測(cè)符合關(guān)聯(lián)設(shè)備才會(huì)啟動(dòng)控制功能,,如轉(zhuǎn)轍機(jī)周邊是否無(wú)人,系統(tǒng)有無(wú)故障等,,同時(shí)啟動(dòng)后會(huì)通過(guò)傳感器判斷轉(zhuǎn)轍機(jī)是否切換到位,。 6、視頻監(jiān)測(cè) 視頻系統(tǒng)分兩個(gè)部分,,一部分安裝在單軌吊上,,對(duì)前后多個(gè)方向視頻圖像做實(shí)時(shí)采集,使操作人員實(shí)時(shí)觀察單軌吊周邊環(huán)境的狀況,,另一部分要安裝在單軌吊運(yùn)行軌跡上,,實(shí)現(xiàn)特定區(qū)域的監(jiān)視。系統(tǒng)由高清紅外攝像頭,、嵌入式視頻采集模塊,、無(wú)線網(wǎng)橋等組成。
7,、數(shù)據(jù)監(jiān)測(cè) 通過(guò)安裝在單軌吊上的車載監(jiān)測(cè)單元可實(shí)時(shí)采集車上的傳感器信息,,在遠(yuǎn)程操作平臺(tái)上顯示,以便操作人員及時(shí)了解設(shè)備狀態(tài),。 通過(guò)對(duì)采集的數(shù)據(jù)進(jìn)行分析,,實(shí)現(xiàn)數(shù)據(jù)顯示及閾值報(bào)警,同時(shí)也可根據(jù)客戶需求加裝傳感器,,如電壓變送器,、變流變送器、速度傳感器等,。 |
|

 蘇公網(wǎng)安備32032102000370
蘇公網(wǎng)安備32032102000370



